

Tabula evolutionis seriei caeruleae Beaglebone AI BB nigra C Industrial WIRELESS
Descriptio Brevis:
Introductio producti
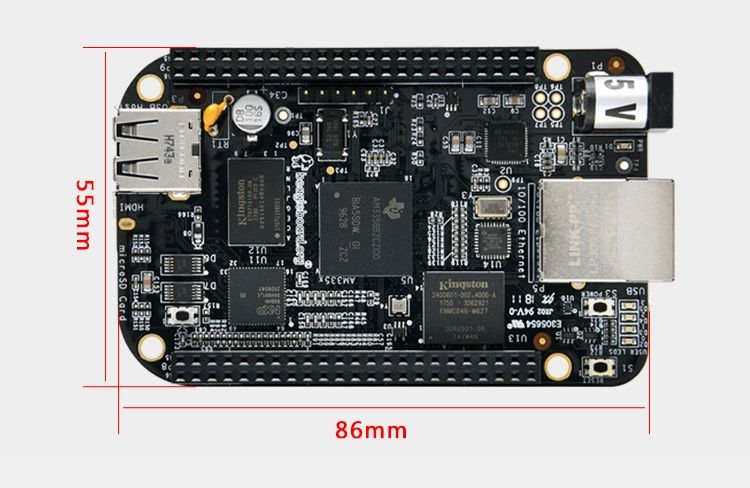
BEAGLEBONEBLACK est suggestus evolutionis vilis et a communitate sustentatus, destinatus programmatoribus et amatoribus, in processore ArmCortex-A8 fundatus. Fune USB tantum, usores LINUX intra decem secundas incipere et opus evolutionis intra quinque minutas incipere possunt.
Memoria interna FLASH DEBIAH GNULIUXTm in BEAGLEBONE BLACK faciliorem aestimationem et progressionem ab usoribus praebet. Praeterquam quod multas distributiones LINUX et systemata operativa [UNUN-TU, ANDROID, FEDORA] sustinet, BEAGLEBONEBLACK functiones suas extendere potest cum tabula insertabili "CAPES" appellata, quae in duas vectes expansionis duplicis ordinis 46-clavorum BEAGLEBONEBLACK inseri potest. Extensibilis, exempli gratia, ad VGA, LCD, prototypa moderationis motoris, potentiam pilae, et alias functiones.

Introductio/Parametri
BeagleBone Niger Industrialis necessitati computatrorum unius tabulae industrialiter aptorum cum ambitu temperaturae extenso satisfacit. BeagleBone Niger Industrialis etiam cum BeagleBone Nigro originali in programmate et Cappa compatibilis est.
BeagleBoneR Niger industrialis in processore Sitara AM3358 fundatus
Sitara AM3358BZCZ100 1GHz, 2000 MIPS ARM Cortex-A8
Microprocessor RISC 32-bit
Subsystema unitatis temporis realis programmabilis
512MB DDR3L 800MHz SDRAM, 4GB memoriae eMMC
Temperatura operandi: -40°C ad +85°C
PMIC PS65217C ad separandum LDO adhibetur ut potentiam systemati praebeat.
Conector SD/MMC pro chartis microSD
Parametrus producti
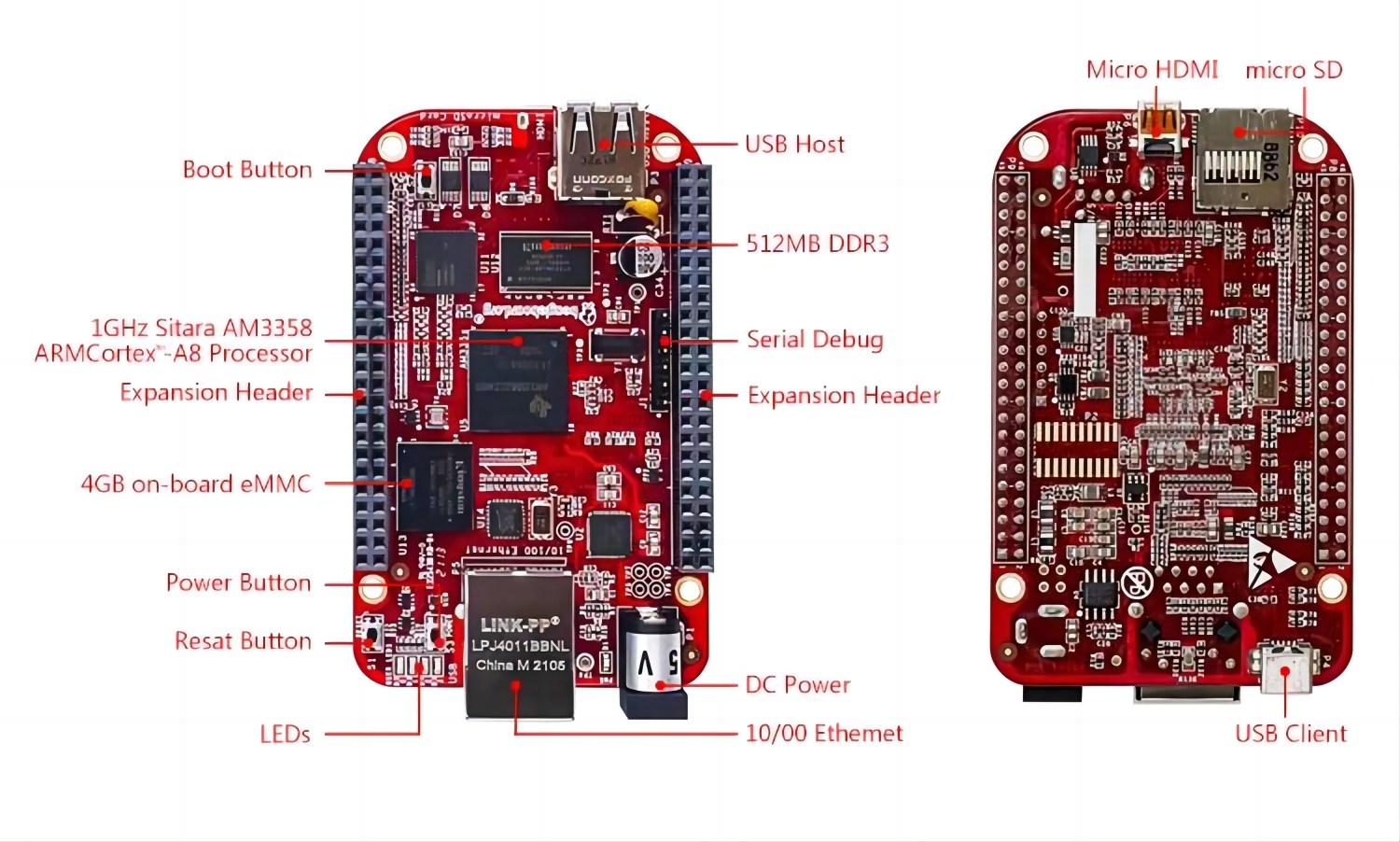
PProcessor:AM3358 Cortex Brachii 1GHZ@-A8
Memoria: 512MB DDR3
Memoria Flash: 4GB eMMC in scheda, accelerator circularis 3D, accelerator puncti fluitantis NEON, 2 microcontrollores PRU 32-bit
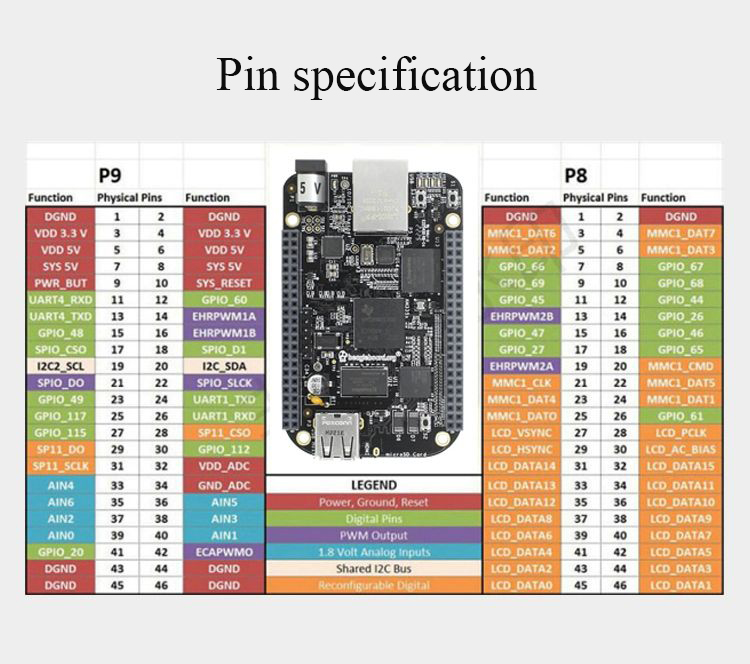
Conexio: Cliens USB ad potentiam et communicationem, portus Ethernet USB hospes, portus HDMI, duo portus 46 feminei duplicis vectis
Compatibilitas programmatum![]() ebian, Android, Cloud9 IDE in BoneScript/Node.js fundatum)
ebian, Android, Cloud9 IDE in BoneScript/Node.js fundatum)
Exempla applicationum: robot, motor impulsor, impressora Twitter, copia datorum, statio basis SDR, acquisitio datorum USB, etc.
· Globulus selectionis initii
· Unum puga potentiae
· Globulus repositionis
· Unum indicatorem potentiae LED
· Quattuor lumina LED ab usore aptata
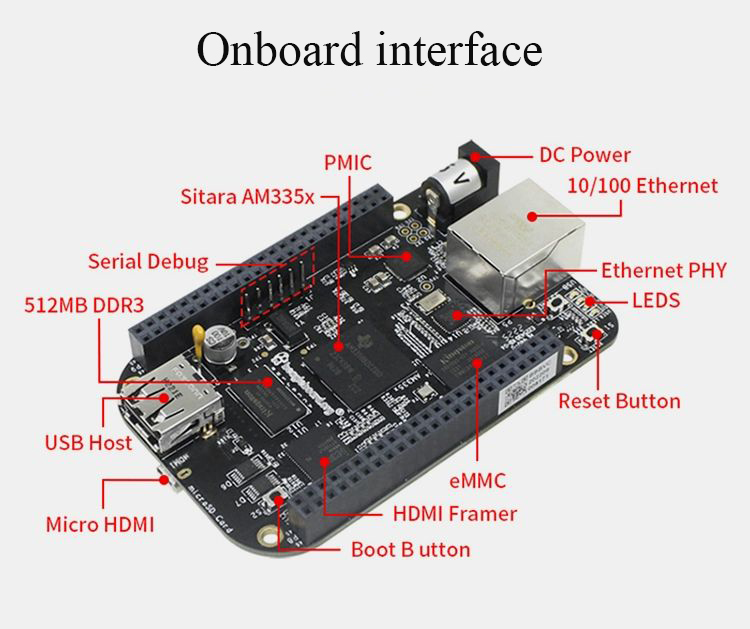
· Interfacies generis HDMID (exitus colorum 16-bit, exitus soni sustinetur)
· Una interfacies LCD (exitum 24-bit sustinet, extractionem interfaciei expansionis P8)
· Una interfacies Ethernet 10/10.0M (connector RJ4)
· Interfacies USB 2.00TG celeris cum PHY (connectore MiniUSB Typi B) integrata
· Interfacies USB 2.0 HOST celerrima cum PHY (connectore USBA) integrato
· Una interfacies chartae TF (compatibilis cum SD/MMC)
· Portus serialis trium filorum ad debugationem (connector sex-clavorum 254-pitch)
· Una interfacies generis HDMID
· Duae interfaces expansionis, LCD, UART, eMMC, ADC, 12C expandere possunt,
· Interfacies SPI et PWM
Introductio/Parametri
BeagleBone Niger Industrialis necessitati computatrorum unius tabulae industrialiter aptorum cum ambitu temperaturae extenso satisfacit. BeagleBone Niger Industrialis etiam cum BeagleBone Nigro originali in programmate et Cappa compatibilis est.
BeagleBoneR Niger industrialis in processore Sitara AM3358 fundatus
Sitara AM3358BZCZ100 1GHz, 2000 MIPS ARM Cortex-A8
Microprocessor RISC 32-bit
Subsystema unitatis temporis realis programmabilis
512MB DDR3L 800MHz SDRAM, 4GB memoriae eMMC
Temperatura operandi: -40°C ad +85°C
PMIC PS65217C ad separandum LDO adhibetur ut potentiam systemati praebeat.
Conector SD/MMC pro chartis microSD
Introductio/Parametri
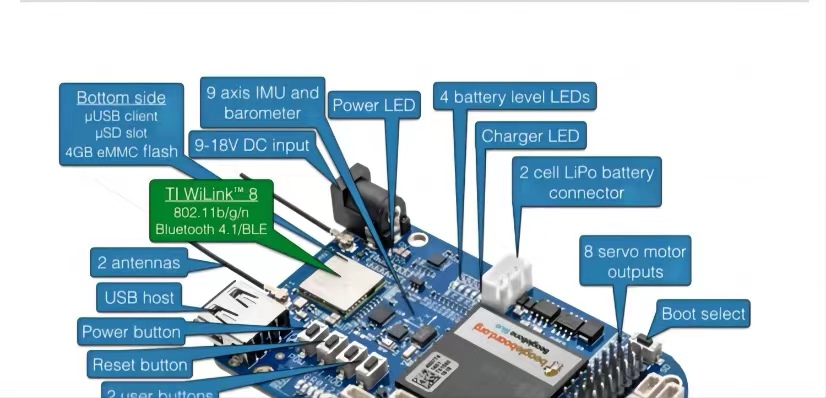
BeagleBone Caeruleus est moderator roboticus in architectura computatrali BeagleBone aperta fundatus. Systemate Linux utens, omnino fonte aperto cum auxilio communitatis, praebens flexibilitatem retiariam et interfaciem machinarum externarum, robotas mobiles celeriter et frugales construere potes.
AM335x 1GHz ARMCortex-A8
Accelerator graphicus SGX530
Accelerometrum puncti fluitantis NEON
Duo PRU 32bit 200MHz PRU
512MB memoriae DDR3 80OMHZ
Memoria flash eMMC inclusa 4GB
Wi-Fi 802.11b /g/n, Bluetooth 4.1 et BLE
Portus principalis clientis USB 2.0
foramen chartae microSD
IMU novem axium et sensorem barometricum habet.
Imperium motoris: 8x 6V exitus, 4x electrodi DC exitus, 4X input encoder orthogonalis
Compatibilitas programmatum![]() ebian, Ardupilot, ROS et Cloud9
ebian, Ardupilot, ROS et Cloud9




Categoriae productorum
-

Telephonum
-

Epistula electronica
-

Whatsapp
-

Skype
-

Skype
-

Skype